жңәеҷЁдәәз”ө(shЁҙ)ҫ~?ROBOT CABLE
ORMз”лҠјҶҫpХdҲ—

жҳҜдёҖӢЖҫдШ“(fЁҙ)з”?shЁҙ)еҠЁжңәзӯүзҡ„жҺ§еҲ¶дҝЎеҸ·дј йҖҒиҖҢдё“й—Ёи®ҫи®Ўзҡ„жңәеҷЁдәәз”ө(shЁҙ)ҫ~ҶгҖӮж №жҚ®еӣәе®ҡйғЁе’ҢеҸҜеҠЁйғЁзҡ„дёҚеҗҢз”ЁйҖ?дҪҝз”ЁеҜйgҪ“е’ҢжқҗиҙЁгҖӮеҗҢж—?дҪҝз”Ёдә?jiЁЈn)дШ?fЁҙ)иҜҶеҲ«з”лҠјҶиҠҜзәҝз”Ёзҡ„йўңиүІеҢәеҲ«е’Ңж ҮжіЁзӯүгҖ?br /> жң¬дс”е“Ғз¬ҰеҗҲRoHSжҢҮдЧo(hЁҙ)гҖ?/p>
ORP-Dз”лҠјҶгғ?nЁЁi)қі»еҲ—пјҲUL2586еQ?/span>

еҜ№еә”иҮ?00Vдёәжӯўзҡ„з”ө(shЁҙ)жәҗз”ЁжңәеҷЁдәәз”ө(shЁҙ)ҫ~ҶгҖӮз»қҫ~ҳжқҗж–ҷйҮҮз”ЁзӢ¬иҮӘејҖеҸ‘зҡ„зүТҺ(guЁ©)®ҠејТҺ(guЁ©)Җ§дҪ“еQҢе…је…·дјҳејӮејҜжӣІжҖ§иғҪдёҺй«ҳжҖ§дӯh(huЁўn)жҜ”гҖ?/p>
ORP-SLз”лҠјҶгғ?nЁЁi)қі»еҲ—пјҲUL2464еQ?/span>

жҜ”ORPз”лҠјҶҳqӣеҢ–зҡ„з»Ҷеҫ„жңәеҷЁдқhз”лҠјҶгҖӮз»қҫ~ҳжқҗж–ҷйҮҮз”ЁзӢ¬иҮӘејҖеҸ‘зҡ„зүТҺ(guЁ©)®ҠејТҺ(guЁ©)Җ§дҪ“еQҢе…·еӨҮеҜ№еә”жңәеҷЁдқhжүҖжңүиҝҗеҠЁеЕһжҖҒзҡ„ејҜжӣІиҖҗд№…жҖ§гҖ?/p>
ORPз”лҠјҶгғ?nЁЁi)қі»еҲ—пјҲUL2464еQ?/span>
ҫlқзјҳжқҗж–ҷйҮҮз”ЁзӢ¬иҮӘејҖеҸ‘зҡ„зүТҺ(guЁ©)®ҠејТҺ(guЁ©)Җ§дҪ“еQҢе…је…·дјҳејӮејҜжӣІжҖ§иғҪдёҺй«ҳжҖ§дӯh(huЁўn)жҜ”зҡ„жңәеҷЁдәәз”ө(shЁҙ)ҫ~ҶгҖ?/p>
OR Superз”лҠјҶгғ?nЁЁi)қі»еҲ—пјҲUL21030еQ?/span>

йЈһи·ғжҖ§жҸҗй«ҳд(shЁҙ)әҶ(jiЁЈn)ејҜжӣІжҖ§иғҪзҡ„OKIжңәеҷЁдәәз”ө(shЁҙ)ҫ~ҶORҫpХdҲ—зҡ„ж——иҲ°з”ө(shЁҙ)ҫ~ҶгҖ?/p>
ORFз”лҠјҶгғ?nЁЁi)қі»еҲ—пјҲUL2517еQ?/span>

йҮҮз”ЁҫlҶзәҝҫlһеҗҲеҜйgҪ“еQҢж°ҹж ?wЁЁi)и„Ӯҫlқзјҳжқҗж–ҷеQҢд»ҺиҖҢжҸҗй«ҳејҜжӣІжҖ§иғҪеQҢйҖӮз”ЁдәҺжңәеҷЁдқhҪ{үзҡ„еҸҜеҠЁйғЁдҪҚгҖӮжҠӨеҘ—дӢЙз”ЁиҖҗжСa(bЁі)жҖ§жқҗж–ҷгҖӮзҺҜдҝқеҜ№еә”дс”е“ҒгҖӮз¬ҰеҗҲRoHSжҢҮдЧo(hЁҙ)гҖ?/p>
ORVз”лҠјҶгғ?nЁЁi)қі»еҲ—пјҲUL20276еQ?/span>

йҮҮз”ЁҫlҶзәҝҫlһеҗҲеҜйgҪ“еQҢд»ҺиҖҢжҸҗй«ҳејҜжӣІжҖ§иғҪеQҢйҖӮз”ЁдәҺжңәеҷЁдқhҪ{үзҡ„еҸҜеҠЁйғЁдҪҚгҖӮпјҲдёҚиғҪдҪҝз”ЁдәҺжүӯиҪ¬иҙҹиҚпL(fЁҘng)”ЁйҖ”пјү(jЁӘ)жҠӨеҘ—дҪҝз”ЁиҖҗжСa(bЁі)жҖ§жқҗж–ҷгҖӮзҺҜдҝқеҜ№еә”дс”е“ҒгҖӮз¬ҰеҗҲRoHSжҢҮдЧo(hЁҙ)гҖ?/p>
VEYOR CABLEеQҲVEYORз”лҠјҶеQ?reg;еQҸVEYOR-SPз”лҠјҶ

- VEYORз”лҠјҶ
з”Ёзү№ҢDҠеј№жҖ§дҪ“зҡ„зІҳжҺҘеүӮеҜҡw«ҳејҜжӣІжңәеҷЁдәәз”ө(shЁҙ)ҫ~ҶиҝӣиЎҢеЖҲжҺ’еҠ е·ҘеҗҺзҡ„з”ө(shЁҙ)ҫ~ҶгҖ?/li> - VEYOR-SPе—ІйӮЈи“?br />еҜ№VEYORз”лҠјҶҳqӣиЎҢиһәж—ӢзҠ¶еҠ е·ҘпјҢд»ҺиҖҢдӢЙз”лҠјҶе…дhңүдјёзҫғжҖ§гҖ?/li>
еҸҜеҠЁйғЁдҪҚз”ЁжңәеҷЁдқhз”лҠјҶ
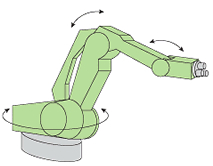
еҶІз”ө(shЁҙ)ҫUҝжҺЁеҮЮZәҶ(jiЁЈn)еҜ№еә”жңәеҷЁдәәзҡ„3ҝUҚд»ЈиЎЁжҖ§еҸҜеҠЁжЁЎеј?/p>
зҡ„еҸҜеҠЁйғЁдҪҚз”ЁжңәеҷЁдәәз”ө(shЁҙ)ҫ~ҶгҖ?/p>
иҖҗејҜжӣІз”ө(shЁҙ)ҫ~?/h4>

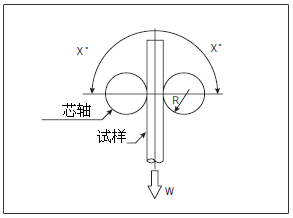
| ејҜжӣІиҜ•йӘҢжң?/th> | ејҜжӣІеҚҠеҫ„R | 10пҪ?00mm |
|---|---|---|
| ејҜжӣІи§’еәҰX | ±60° | |
| ±90° | ||
| ејҜжӣІйҖҹеәҰ | 60ӢЖ?еҲ?/td> | |
| и®Ўж•° | 1еҫҖеӨ?ӢЖ?/td> | |
| иҜ•йӘҢиҪҪйҮҚW | 0.98пҪ?.8N |
иҖҗеҫҖеӨҚејҜжӣІз”ө(shЁҙ)ҫ~?/h4>

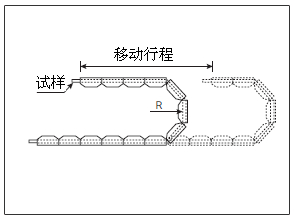
| еҫҖеӨҚејҜжӣІиҜ•йӘҢжңәеQҲз”ө(shЁҙ)ҫ~Ҷжүҳй“ҫпјү(jЁӘ) | еӨ–еҫ„ | 30ПҶд»ҘдёӢ | 9ПҶд»ҘдёӢ |
|---|---|---|---|
| ҝUХdҠЁиЎҢзЁӢ | 1.5m | 350mm | |
| ејҜжӣІйҖҹеәҰ | 15ӢЖ?еҲ?/td> | 30пҪ?0ӢЖ?еҲ?/td> | |
| ејҜжӣІеҚҠеҫ„R | 60пҪ?00mm | 20mmпҪ?0mm | |
| и®Ўж•° | 1еҫҖеӨ?ӢЖ?/td> | ||
иҖҗжүӯиҪ¬з”ө(shЁҙ)ҫ~?/h4>

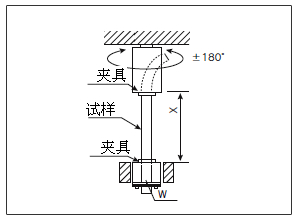
| жүӯиқ{иҜ•йӘҢжң?/th> | жүӯиқ{и§’еәҰ | ±180°еQҲеӣәе®ҡпјү(jЁӘ) |
|---|---|---|
| и·ЁеәҰX | 300mm, 500mm | |
| жүӯиқ{йҖҹеәҰ | 15ӢЖ?еҲ?еQҲеӣәе®ҡпјү(jЁӘ) | |
| и®Ўж•° | 1еҫҖеӨ?ӢЖ?/td> |